
- Home/
- GATE MECHANICAL/
- GATE ME/
- Article
What is Four Bar Mechanism? Definition, Theorem, Examples
By BYJU'S Exam Prep
Updated on: September 25th, 2023

A four bar mechanism is composed of four rigid bars attached to each other to produce the desired output. Before understanding the four-bar mechanism, it is crucial to understand the mechanism. A mechanism is a device that turns the required input and motion set into the necessary output forces and motion.
Four Bar Mechanism PDF
Moving parts in mechanisms include gears and gear trains, belts and chain drives, cams and followers, linkages, and so on. Machine elements include friction devices such as brakes and clutches, as well as structural components such as frames, bolts, bearings, springs, lubricants, Splines, pins, and keys. A motor is typically used to power such a system. Let’s deep dive into the concepts related to four bar mechanism or four-bar linkage. Here, we will learn about the four bar mechanism, its definition, its theorem, and a few examples.
Table of content
What is the Four Bar Mechanism?
The simplest closed-chain movable linkage is a four-bar linkage, commonly known as a four bar mechanism. It comprises four bodies called bars or links joined in a loop by four joints. The joints are typically constructed, so the links travel in parallel planes, and the assembly is known as a planar four-bar linkage. There are also spherical and spatial four-bar links, which are employed in reality.
Grasshof’s Theorem for Four Bar Mechanism
The link length dimension ratio determines the motion characteristics of a four-bar mechanism. The links connecting to the fixed link may experience one of two types of motion:
- The link may rotate completely around the fixed axis (we call this type of link crank)
- The link may swing (oscillate) between two limiting angles (we call this type of link rocker).
We can have three different types of motion in a four-bar mechanism:
- Both links connecting to the fixed link can complete a full rotation. This type of four-bar is known as a double-crank or drag-link.
- Both links connecting to the fixed link can do nothing except oscillate. This style of four-bar is known as a double-rocker.
- One of the links connecting to the fixed link oscillates, whereas the other rotates fully. This sort of four-bar is known as a crank-rocker.
The Grashof condition for a four-bar linkage states that if the sum of a planar quadrilateral linkage’s shortest and longest links is less than or equal to the sum of the remaining two links, then the shortest link can rotate entirely concerning a neighboring link. In other words, the condition is satisfied if
S + L ≤ P + Q
where S is the smallest link, L is the longest, and P and Q are the other links.
Planar Four Bar Mechanism
The Planar four bar Mechanism comprises four links joined together in a loop by four one-degree-of-freedom joints. A joint can be a revolute joint (also known as a pin joint or hinged joint) represented by R or a prismatic joint (also known as a sliding pair) denoted by P.
- A ground link is a link that is fixed in place relative to the viewer.
- A crank link is a link that connects to the ground via a revolute joint and can turn completely.
- A rocker link is a link that connects to the ground via a revolute joint but cannot complete a full revolution.
- A slider is a link that connects to a ground line via a prismatic junction. Sliders are sometimes considered cranks with a hinged pivot located endlessly perpendicular to the slider’s movement.
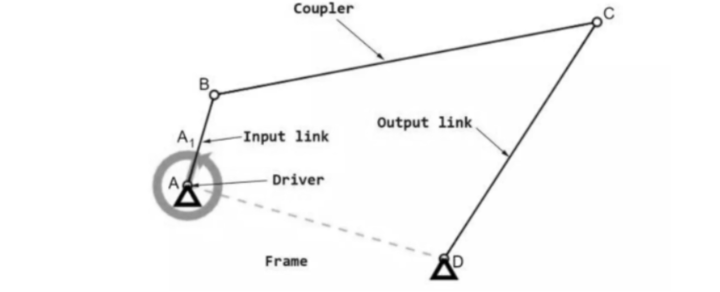
- A floating link or coupler is a link that connects two other links. A connecting rod is a coupler that connects a crank and a slider in a single slider crank mechanism. However, the term has also been used to apply to any coupler form.
Depending on whether revolute or prismatic joints are used, there are three basic types of planar four-bar linkage:
- Four revolute joints
- Three revolute joints
- Two revolute joints and two prismatic joints
Inversions of Four Bar Mechanism
Inversion of mechanism is the process of altering the links in a kinematic chain one link at a time to produce alternative mechanisms. The number of inversions will equal the number of kinematic chain links. Following are the Inversions of the four bar chains.
| S.No. | Inversion | Types of Inversions |
|
1
|
Double Crank Mechanism | |
| Crank and lever mechanism | ||
| Double lever mechanism | ||
|
2
|
Reciprocating engine mechanism | |
| Oscillating cylinder engine mechanism | ||
| Crank and slotted lever mechanism | ||
| Whitworth quick return motion mechanism | ||
| Rotary engine mechanism | ||
| Bull engine mechanism | ||
| Hand Pump |
Application of Four Bar Mechanism
The four bar mechanism is a type of mechanical linkage that is used in many different devices. There are several applications for four-bar systems in equipment. Typical applications will include:
- Locking pliers
- Bicycles
- Oil well pumps
- Loaders
- Internal combustion engines
- Compressors
- Pantographs
Get complete information about the GATE exam pattern, cut-off, and all those related things on the BYJUS Exam Prep official youtube channel.



