
- Home/
- GATE MECHANICAL/
- GATE ME/
- Article
Kinematic Chain: Definition, Types [GATE Notes]
By BYJU'S Exam Prep
Updated on: September 25th, 2023

A Kinematic Chain is formed when a few links are connected, and there is relative motion. Before we get into the kinematic chain, let’s talk about the mechanism. A mechanism is a device that converts the requisite input forces and motion into the required output forces and motion. Gears and gear trains, belts and chain drives, cams and followers, linkages, and other moving parts are examples of mechanisms. Friction devices such as brakes, clutches, and structural components are examples of machine elements.
Kinematic Chain PDF
Motion is transformed via the kinematic chain mechanism. And it is made up of links connected by movable joints that form a closed kinematic chain with one link as the reference. The four-bar mechanism is the most basic kinematic chain we have. Because there is no relative motion between the links in the three-bar system. As a result, the three-bar mechanism is referred to as a locked chain. Here, we will learn various details about kinematic chains, such as application, advantages and disadvantages.
Table of content
What is Kinematic Chain?
A kinematic chain is a series of interconnected bodies that can move relative to each other. In robotics, a kinematic chain is often used to describe the arrangement of joints and links in a robot manipulator. Each link in a kinematic chain is connected to the next link by a joint, which allows for relative movement between the two links. The kinematic chain is essential to a segment of the GATE ME syllabus. The movement of the links and joints in a kinematic chain can be controlled by applying forces and torques.
Kinematic chains are used in various applications, including manufacturing, material handling, and other tasks that require precise manipulation of objects. They are also used in the design of prosthetics, exoskeletons, and other assistive devices. Kinematic chains are typically described using a set of kinematic equations, which describe the relationship between the movements of the links and joints in the chain. These equations can be used to predict the motion of the kinematic chain and to design controllers that can control the motion of the chain.
Kinematic Chain Definition
The definition says, “A kinematic chain is a collection of links joined together by joints that allow relative motion between them.” This definition is important for the GATE exam as MSQ questions may be formulated using this.
What is an Inversion of a Mechanism?
when we fix a Kinematic link in the chain, we create a mechanism. A mechanism is a machine component that consists of two or more elements arranged in such a way that the motion of one compels the motion of the others. Changes the direction of movement, the type of movement, the speed of movement, and the amount of torque or force available to do work. The mechanism inversion is nothing more than obtaining more mechanisms by fixing different Kinematic links in the Kinematic chain.
Different Types of Kinematic Chains
The kinematic chains with four lower pairings are the most essential. When the pair is sliding or turning, it is referred to as a lower pair. A lower pair is an ideal joint that restricts contact between a moving body surface and a corresponding fixed body surface. Following are the types of Kinematic Chains.
- Four Bar Chain
- Single Slider Crank Chain
- Double Slider Crank Chain
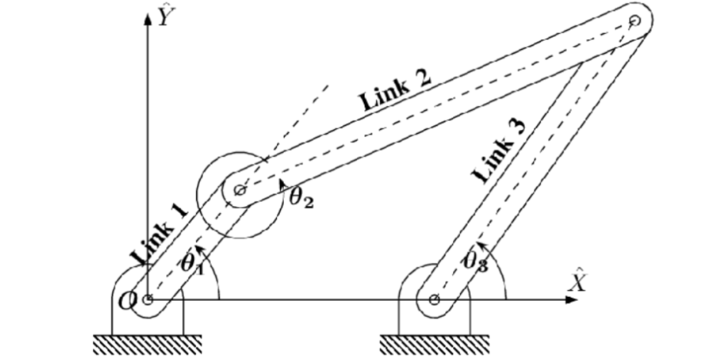
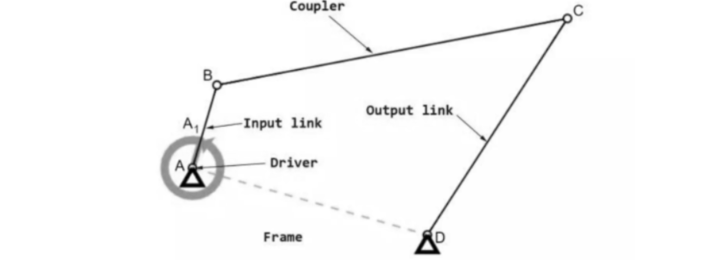
Four Bar Chain
The Quadric Cycle chain is another name for the Four Bar chain. The four-bar chain will consist of four links, each of which will make one turning pair. These four links might have varying lengths. The sum of the shortest and longest link lengths should be bigger than the sum of the other two links, according to Grashof’s law(mentioned in the GATE ME exam syllabus) for a Four bar mechanism. One of the most critical aspects of any mechanism is that one of the connections completes one full revolution. Which will be the mechanism’s input crank? It transforms rotary motion into oscillating motion.
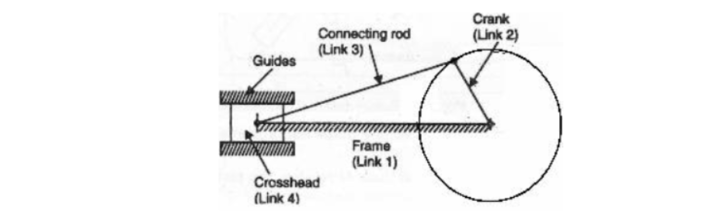
Single Slider Crank Chain
The redesigned Four Bar mechanism is used in the Single Slider Crank Chain system. Unlike the four-bar mechanism, which has four turning pairs, the Single slider crank chain mechanism has three turning pairs and one sliding pair.
As you can see, there is a crank and a connecting link, fixed link as the fixed base. The four links represent the location moving in the crosshead. The piston and crosshead form the sliding pair, while the rest form the rotating pairs. This mechanism will be used by all reciprocating engines. This mechanism will convert reciprocating motion into rotary motion and vice versa.
Double Slider Crank Chain
The name implies that the double slider crank chain mechanism will have two sliding and two rotating pairs. As illustrated in the preceding image, the Double slider crank chain system. We have four elements in that (two sliding elements, one lever, slotted one base). The lever element connects the two sliding elements. With the two sliding pieces, this liver will form two rotating pairs. The slotted base will create two sliding pairs with the sliding parts.

These are the various kinds of Kinematic chains. Each of these three processes has its own inversion mechanism.
Applications of Kinematic Chain
Kinematic chains are used in a variety of applications, including:
-
Manufacturing: Kinematic chains are used to assemble and manipulate parts precisely and repeatedly. They are often used in automated manufacturing systems to perform welding, painting, and material handling tasks.
-
Material handling: Kinematic chains are used in material handling applications to move and position objects in a controlled manner. This can include loading and unloading goods from trucks, palletizing and depalletizing packages, and sorting items on a conveyor belt.
-
Robotics: Kinematic chains are used in the design of robot manipulators, which perform tasks such as welding, painting, and assembly in manufacturing environments. They are also used in the design of service robots, which can perform tasks such as cleaning, delivery, and healthcare in public spaces.
-
Prosthetics and exoskeletons: Kinematic chains are used in prosthetics, which can replace lost or impaired body parts, and exoskeletons, which are wearable devices that can augment the strength and mobility of the human body.
-
Assistive devices: Kinematic chains are also used in the design of assistive devices, such as wheelchairs, crutches, and walkers, which can help people with mobility impairments to move more easily.
Advantages of Kinematic Chain
There are several advantages to using kinematic chains in robotics and other applications:
-
Precision: Kinematic chains can provide precise and repeatable motion, which is useful for tasks that require high levels of accuracy, such as assembly, welding, and painting.
-
Versatility: Kinematic chains can be designed to perform various tasks and customized for specific applications.
-
Compactness: Kinematic chains can be designed to be compact and lightweight, making them suitable for use in environments where space is limited.
-
Reliability: Kinematic chains are generally reliable and can operate continuously for long periods of time without requiring maintenance.
-
Safety: Kinematic chains can be designed to be safe for use around humans and can be equipped with sensors and other safety features to prevent accidents.
-
Cost: Kinematic chains can be relatively inexpensive to design and build, especially compared to more complex robotics systems.
Disadvantages of Kinematic Chain
There are also some disadvantages to using kinematic chains:
-
Limited range of motion: The range of motion of a kinematic chain is limited by the lengths and orientations of the links and the constraints imposed by the joints.
-
Sensitivity to external forces: Kinematic chains can be sensitive to external forces affecting their performance, such as wind or vibrations.
-
Complexity: The design and control of kinematic chains can be complex, especially for systems with many degrees of freedom.
-
Limited adaptability: Kinematic chains are typically designed for specific tasks and may not be easily adaptable to new tasks or environments.
-
Wear and maintenance: Kinematic chains can suffer from wear and tear over time and may require regular maintenance to keep them operating at their best.
Get complete information about the GATE exam pattern, cut-off, and all those related things on the BYJUS Exam Prep official youtube channel.
![Kinematic Chain: Definition, Types [GATE Notes]](https://gs-post-images.grdp.co/2020/3/telegram_png30-1-img1585473029191-76.png-rs-high-webp.png)


