
- Home/
- GATE MECHANICAL/
- GATE ME/
- Article
Collisions and Virtual Work Study Notes for GATE ME Exam
By BYJU'S Exam Prep
Updated on: September 25th, 2023

Collisions and Virtual Work Study Notes for GATE ME Exam provide a comprehensive understanding of the fundamental concepts of collisions and virtual work for mechanical engineering students preparing for the GATE exam. These study notes cover the key topics in the subject, including conservation of momentum, impulse, coefficient of restitution, and the principle of virtual work. With these notes, students can gain a deeper understanding of these concepts and develop their problem-solving skills to ace the GATE ME Exam.
The Collisions and Virtual Work Study Notes for GATE ME Exam are designed to provide students with concise and comprehensive notes that cover all the essential topics required for the GATE exam. These notes are prepared by experienced educators and mechanical engineering experts, who have extensive knowledge of the exam pattern and requirements. The notes are structured in a way that helps students to quickly grasp the concepts, which are presented in a clear and concise manner. Additionally, the notes contain several solved examples and practice problems that enable students to master the concepts and apply them to solve complex problems in the exam.
Table of content
-
1.
Collision of Elastic Bodies

-
2.
Collision
-
3.
Direct Collision
-
4.
Law of Conservation of Momentum
-
5.
Newton’s Law of Collision of Elastic Bodies
-
6.
Indirect Collision
-
7.
Indirect Impact of Two Bodies
-
8.
Indirect Impact of a Body with a Fixed Plane
-
9.
Virtual Work
-
10.
Principle of Virtual Work
-
11.
Important Tips for GATE Preparation
-
12.
Related Important Links
Collision of Elastic Bodies
When two bodies collide, they can either stick together or rebound. In the case of an elastic collision, the bodies rebound and conserve both momentum and kinetic energy. The coefficient of restitution (e) is a measure of the elasticity of the bodies and is defined as the ratio of the relative velocities of separation and approach of the bodies. The value of e lies between 0 and 1, where 0 represents a completely inelastic collision and 1 represents a completely elastic collision.
During an elastic collision, both the momentum and kinetic energy are conserved. Momentum is conserved because the total momentum of the system before the collision is equal to the total momentum after the collision. Kinetic energy is conserved because the work done by the internal forces during the collision is zero. The principle of conservation of momentum and energy can be used to solve problems related to elastic collisions. The knowledge of the coefficient of restitution is crucial to determining the final velocities of the bodies after the collision.
Collision
A collision is an event in which two or more bodies come into contact with each other and exchange energy and/or momentum. Collisions can be categorized into two types: elastic and inelastic. In an elastic collision, the bodies rebound after the collision and conserve both momentum and kinetic energy. In an inelastic collision, the bodies stick together after the collision and do not conserve kinetic energy. Instead, the kinetic energy is transformed into other forms of energy, such as heat or sound.
Collisions are fundamental concepts in physics and play a crucial role in various real-world scenarios, such as car accidents, sports, and industrial processes. The principles of momentum and energy conservation are applied to analyze and solve problems related to collisions. Understanding the type of collision and the properties of the bodies involved, such as mass, velocity, and elasticity, are essential in predicting the outcomes of a collision. The study of collisions is essential in various fields, such as engineering, physics, and mechanics, and has numerous practical applications in designing safer and more efficient systems.
Time of collision = time of compression + time of restitution
A direct collision is a collision in which the two bodies, before impact, are moving along the line of impact. Indirect collision if the two bodies, before impact are not moving along the line of impact.
Direct Collision
In a direct collision, two bodies move in opposite directions along the same straight line and collide head-on. During the collision, the bodies may stick together or rebound depending on the nature of the collision. The kinetic energy of the system is converted into other forms of energy such as heat, sound, and deformation energy, and the momentum is conserved. Direct collisions are commonly encountered in real-life scenarios, such as in car accidents, where two vehicles collide head-on.
The conservation of momentum principle is crucial in analyzing direct collisions. By applying the principle of conservation of momentum, we can determine the velocities of the bodies before and after the collision. In the case of an elastic collision, the coefficient of restitution (e) is also important in determining the final velocities of the bodies after the collision. For an inelastic collision, the kinetic energy is not conserved, and the final velocity of the bodies after the collision can be determined by applying the principle of conservation of momentum and the coefficient of restitution.
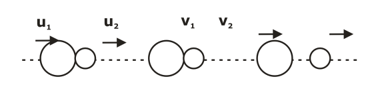
Law of Conservation of Momentum
The law of conservation of momentum states that the total momentum of a system of bodies remains constant if there are no external forces acting on the system. In other words, the momentum of the system before an event is equal to the momentum of the system after the event. This law is a fundamental principle in physics and is applicable to all physical systems, ranging from subatomic particles to the universe as a whole.
“The total momentum of two bodies remains constant after their collision.”
m1 = mass of the first body
u1 = Initial velocity of the first body
v1 = Final velocity of the first body
m2, u2, v2 = corresponding values for the second body.
m1u1+m2 u2 = m1v1+ m2 v2
Newton’s Law of Collision of Elastic Bodies
Newton’s Law of Collision of Elastic Bodies is a fundamental principle in classical mechanics that describes the behaviour of two or more objects that collide with one another. This law applies to collisions between objects that are both elastic, meaning that they can deform under the force of the collision and then return to their original shape. According to this law, the total momentum and energy of the objects involved in the collision is conserved, which means that the sum of their momentum and energy before the collision is equal to the sum of their momentum and energy after the collision. This law has many practical applications in fields such as physics, engineering, and sports, and is an important concept for understanding the behaviour of objects in motion.
“When two bodies collide with each other, their velocity of separation bears a constant ratio to their velocity of approach.”
m1 = mass of the first body
u1 = velocity of the first body before impact
v1 =velocity of the first body after impact
m2, u2, v2 = Corresponding values for the second body.
Let us assume that u1 > u2 and v2 > v1
v2 – v1 = e(u1 – u2), Where e = coefficient of restitution
- e varies between 0 and 1.
- Perfectly elastic collision: When e = 1, the velocity of approach = velocity of separation
- Inelastic collision: when e = 0, v2 = v1
Loss of Kinetic Energy
- Only in Inelastic collision.
- Difference between kinetic Energies of the system before and after the collision.
EL = Ef – Ei = (1/2) m1v12 + (1/2) m1v12 – (1/2) m1u12 – (1/2) m1u12
Direct Impact of a Body with a Fixed Plane
When a body impacts a fixed plane directly, the impact is said to be a direct impact. The behaviour of the body after impact depends on various factors such as the velocity of the body before impact, the mass of the body, the angle of impact, and the coefficient of restitution between the body and the plane.Here are some of the direct impacts of a body with a fixed plane:
-
Elastic Impact: An elastic impact occurs when the body bounces back from the fixed plane with the same velocity and angle of incidence as before the impact. This type of impact is possible when the coefficient of restitution between the body and the plane is equal to one.
-
Plastic Impact: A plastic impact occurs when the body collides with the fixed plane and comes to rest after the impact. This type of impact is possible when the coefficient of restitution between the body and the plane is zero.
-
Partially Elastic Impact: A partially elastic impact occurs when the body bounces back from the fixed plane with a reduced velocity and angle of incidence as compared to before the impact. This type of impact is possible when the coefficient of restitution between the body and the plane is between zero and one.
-
Oblique Impact: An oblique impact occurs when the body collides with the fixed plane at an angle other than 90 degrees. In this case, the velocity of the body after impact is dependent on the angle of impact, the mass of the body, and the coefficient of restitution between the body and the plane.
Indirect Collision
In an indirect collision, two objects collide sequentially with a third object, rather than directly colliding with each other. During an indirect collision, the total momentum and energy of the system are still conserved. This type of collision is often seen in sports, such as billiards, where the cue ball strikes one object ball, which then strikes another object ball, transferring momentum and energy through the system. Indirect collisions can be analyzed using the principles of conservation of momentum and energy.
Indirect Impact of Two Bodies
When two bodies collide indirectly, their motion and direction are altered due to the impact, but the actual collision does not occur between the two bodies themselves. Instead, the bodies are affected by a third object or force that causes them to move in a new direction. The principle of conservation of momentum still applies in these types of collisions, meaning that the total momentum of the system remains constant both before and after the collision.
m1 = mass of the first body
u1 = Initial velocity of the first body
v1 = Final velocity of the first body
a1 = Angle which is the initial velocity of the first body made with the line of impact
q1 = Angle which is the initial velocity of the first body made with the line of impact
m2, u2, v2, a2, q2 = Corresponding values for the second body.
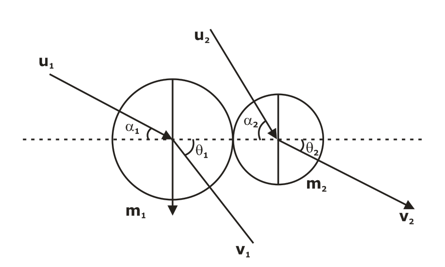
Fig:2
According to the Law of Conservation of Momentum along the line of impact,
m1u1 Cos a1 + m2 u2Cos a2 = m1v1 Cos q1 + m2v2 Cos q2
According to Newton’s Law of elastic collision along the line of impact,
v2 cos q2 – v1 cos q1 = e(u1 cos a-u2 cos a2)
Indirect Impact of a Body with a Fixed Plane
When a body collides with a fixed plane at an angle, the impact is said to be indirect. In this type of collision, the body rebounds from the plane in a new direction, and the angle of incidence is equal to the angle of reflection. The magnitude of the velocity of the body after the collision depends on the mass and velocity of the body before the collision, as well as the angle of incidence and the coefficient of restitution of the surface.
Consider a body having an indirect impact on a fixed plane as shown in Fig 3.
Let u = Initial velocity of the body,
v = Final velocity of the body,
α = Angle, which is the initial velocity of the body makes with the line of impact,
θ = Angle which the final velocity of the body makes with the line of impact, and
e = Coefficient of restitution.
A little consideration will show, that the component of u, along the line of impact, will cause the direct ‘impact’ of the body with the fixed plane. The other component of u (i.e. along the perpendicular to the line of impact) will not affect the phenomenon of impact and will be equal to the other component of v (i.e., along the perpendicular to the line of impact).
We know that velocity of approach = u cos α
and velocity of separation = v cos θ
Newton’s Law of Collision of Elastic Bodies also holds good for this impact i.e.,
v cos θ = eu cos α
Notes:
- In this impact also, we do not apply the principle of momentum (i.e. equating the initial momentum and the final momentum) since the fixed plane has infinite mass.
- The components of initial and final velocities at right angles to the line of impact are same u sin α = v sin θ
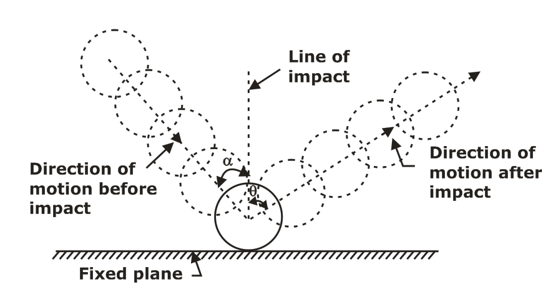
Fig:3
Virtual Work
Virtual work is a concept in physics and engineering that describes the work done by a system of forces that are in equilibrium but could cause motion if they were unbalanced. It is the work done by an infinitesimal displacement in a virtual direction in a system of forces. The principle of virtual work states that the total virtual work done by all the forces acting on a system must be zero for the system to be in equilibrium. This principle is used in various fields, including mechanics, thermodynamics, and electromagnetism, to analyze and design systems that are in equilibrium or in motion. It is particularly useful for analyzing complex systems and determining the stability of a structure or system.
Principle of Virtual Work
Consider a particle at A, subjected to several forces F1, F2, F3, …, Fn as shown in Fig. We assume that the particle undergoes a small virtual displacement δr from A to A’. The work of each of the forces F1, F2, F3 Fn during the virtual displacement δr is called virtual work. The virtual work of all the forces acting on the particle is
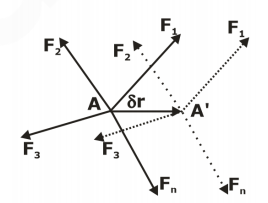
Fig.4: Principle of virtual work
dU = F1 .δr + F2 .δr + F3 .δr + ….. + Fn.δr
= (F1+ F2 + F3+ ….. + Fn).δr
dU = (ΣF).δr, …….(i)
where ΣF is the resultant of the given forces.
If we express ΣF and δr in terms of their rectangular components, we have
dU= (iΣFx+ jΣFy + kΣFz).(iδx + jδy + kδz)
dU = ΣFx δx + ΣFy δy +ΣFz z.
The principle of virtual work for a particle states that if a particle is in an equilibrium, the total virtual work of the forces acting on the particle is zero for any virtual displacement of the particle. This condition is necessary; if the particle is in equilibrium, the resultant ΣF of the forces is zero, and it follows from Equation (1) that the total virtual work dU is zero. The condition is also sufficient: if the total virtual work dU is zero for any virtual displacement, the scalar product (ΣF). δr is zero for any δr, and the resultant ΣF must be zero. The principle of virtual work for a rigid body states that if a rigid body is in equilibrium the total virtual work of the external forces acting on the rigid body is zero for any virtual displacement of the body.
Sign Conventions
Virtual work is a measure of the work done by virtual displacements, which are imaginary, infinitesimal displacements that satisfy the constraints of the system. The virtual work principle states that for a system in equilibrium, the virtual work done by all forces and moments acting on the system must be zero.
To determine the sign of virtual work, we use the following conventions:
-
Positive Virtual Work: If the virtual displacement and the force acting on the system are in the same direction, then the virtual work done by the force is positive.
-
Negative Virtual Work: If the virtual displacement and the force acting on the system are in opposite directions, then the virtual work done by the force is negative.
-
Positive Virtual Moment: If the virtual rotation and the moment acting on the system are in the same sense, then the virtual work done by the moment is positive.
-
Negative Virtual Moment: If the virtual rotation and the moment acting on the system are in opposite senses, then the virtual work done by the moment is negative.
These sign conventions ensure that the virtual work done by all the forces and moments in the system is correctly accounted for in determining the equilibrium conditions.
Important Tips for GATE Preparation
- How to use Virtual Calculator for GATE 2024
- Topper’s Strategy for GATE Exam Preparation
- GATE 2024 Exam Syllabus
Related Important Links
Get complete information about the GATE exam pattern, cut-off, and all those related things on the BYJU’S Exam Prep official youtube channel.



