
- Home/
- GATE MECHANICAL/
- GATE ME/
- Article
Balancing of Reciprocating and Rotating Masses
By BYJU'S Exam Prep
Updated on: September 25th, 2023

Balancing of Reciprocating and Rotating Masses is an essential aspect of Mechanical engineering. The efficient operation of machines, such as engines and turbines, requires that all internal components be in balance to minimize vibration, noise, and wear. Unbalanced reciprocating and rotating masses can cause significant damage to equipment, leading to decreased performance and even failure of the machinery.
Balancing of Reciprocating and Rotating Masses PDF
For Balancing of Reciprocating and Rotating Masses, engineers use a technique called dynamic balancing. The process of balancing involves redistributing the mass of rotating and reciprocating components to achieve a state of equilibrium. Balancing ensures that the center of gravity of the machine is located at its geometric center, reducing the amplitude of vibrations and preventing damage to the bearings and other components.
Table of content
What is the Balancing of Reciprocating and Rotating Masses?
The principles of balancing reciprocating and rotating masses are rooted in classical mechanics, including Newton’s laws of motion and conservation of momentum. The technique involves calculating the forces generated by the rotating and reciprocating masses and designing counterweights to balance these forces. The methods used for balancing include static balancing, dynamic balancing, and balancing multiple masses.
The importance of balancing reciprocating and rotating masses extends beyond just the Mechanical components of the machinery. Unbalanced machines can also lead to safety hazards for operators and other personnel in the vicinity of the equipment. Therefore, balancing is critical to ensure the safe and efficient operation of machines in various industries, including manufacturing, transportation, and energy production.
Balancing of Rotating Masses
Balancing of rotating masses is a process that involves identifying and reducing vibrations caused by unbalanced centrifugal forces in rotating equipment. Unbalanced rotating masses can cause serious damage to machinery, which can result in production delays and even accidents. The aim of balancing is to ensure that the mass center of the rotating machine is located on its rotational axis, minimizing the amplitude of vibrations and improving overall performance.
The balancing of rotating masses can be accomplished using either static or dynamic balancing techniques. Static balancing involves adding weight to the machine to balance the forces generated by the rotating masses. The balancing reciprocating and rotating masses are important for the GATE ME exam. This technique is typically used for simple machines with only one or two rotating masses. On the other hand, dynamic balancing is used for complex machines with multiple rotating masses. It involves the use of special equipment to measure the vibrations caused by the rotating masses and add counterweights to balance them. When an unbalanced mass rotates about an axis it experiences a centrifugal force in a radially outward direction. This force is called a disturbing force of the system.
The magnitude of the disturbing force is: Fc = mrω2
where,
- Fc = centrifugal force or disturbing force, N
- m = mass of the rotating body, kg.
- r = distance of centre of mass (C.G) from the axis of rotation, m
- ω = angular speed of rotation, rad/s.
Balancing of Single Mass Rotating in Single Plane
Balancing a single mass rotating in a single plane involves adjusting the mass distribution of a rotating system so that the system’s centre of mass coincides with its axis of rotation. This is done to reduce unwanted vibrations, improve stability, and increase the lifespan of the system.
There are several methods for balancing a single mass rotating in a single plane. One common method is called static balancing. In this method, the system is supported on two or more knife edges or bearings, and the location of the centre of mass is determined by balancing the system on each support individually. The system is then adjusted by adding or removing weight until it is balanced on all supports. Many times, one or several masses are rotating in a single plane. Examples of such cases are steam turbine rotors, impellers of centrifugal pumps, impellers of hydraulic turbines, etc.
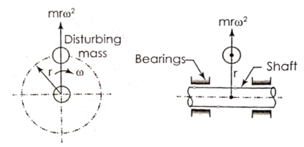
During the rotation of the shaft, a dynamic force (centrifugal force) equal to mrω2 acts in a radially outward direction as shown in the above figure.
This unbalanced force results in an increase in load on the bearings increased bending moment on the shaft and vibrations of the system.
This dynamic force can be balanced by either of the following two methods.
- Balancing by a single mass rotating in the same plane (Internal balancing)
- Balancing by two masses rotating in two different planes (External balancing)
Balancing of Several Masses Rotating in the Same Plane
Balancing several masses rotating in the same plane involves adjusting the mass distribution of a rotating system so that its centre of mass coincides with its axis of rotation. This is done to reduce unwanted vibrations, improve stability, and increase the lifespan of the system.
There are several methods for balancing several masses rotating in the same plane. One common method is called static balancing. In this method, the system is divided into several subassemblies, and the location of the centre of mass of each subassembly is determined by balancing it on two or more supports. The subassemblies are then adjusted by adding or removing weight until they are balanced on all supports. Finally, the subassemblies are assembled together, and the entire system is checked for balance. If the combined mass centre of the system lies on the rotational axis then it is called static balance. Consider masses attached in the same plane. Due to rotation, the unbalanced force is mrω2 in each mass
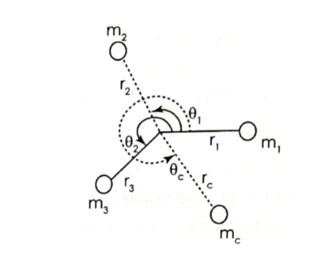
F = m1r1ω2 + m2r2ω2 + m3r3ω2
Here all forces are in the same plane. Place another mass mc at rc with θc angle with respect to m1, such that the resultant force becomes zero.
⇒ F + mcrcω2 = 0
⇒ ∑mrω2 + mcrcω2 = 0
⇒ ∑ mr + mcrc = 0
The above equation can be solved either mathematically or graphically.
Mathematical Solution
Divide each force into its x and y components,
i.e. ∑ mrcosθ + mcrccos θc = 0 ⇒ mcrc cosθc = –∑mrcosθ
and ∑ mrsinθ + mcrcsin θc = 0 ⇒ mcrcsin θc = –∑mrsinθ
⇒ tanθc = [-∑ mr sinθ]/[-∑ mr sinθ]
Balancing of Several Masses Rotating in Different Planes
Balancing several masses rotating in different planes can be a more complex task than balancing masses rotating in the same plane. The goal of balancing is still to adjust the mass distribution of the rotating system so that its centre of mass coincides with its axis of rotation, but the additional complexity arises because the masses are rotating in different planes.
One common method for balancing several masses rotating in different planes is to use multi-plane balancing techniques. This involves dividing the system into several subassemblies, each with its own rotating plane, and balancing each subassembly individually. Once each subassembly is balanced, they are reassembled, and the entire system is checked for balance. Let there be a rotor revolving with a uniform angular velocity ω.m1 m2 and m3 are the masses attached to the rotor at radii r1, r2 and r3 respectively. The masses m1, m2 and m3 rotate in planes 1, 2, and 3 respectively. Choose a Reference plane at O so that the distances of the planes 1, 2, and 3 from O are L1, L2 and L3 respectively.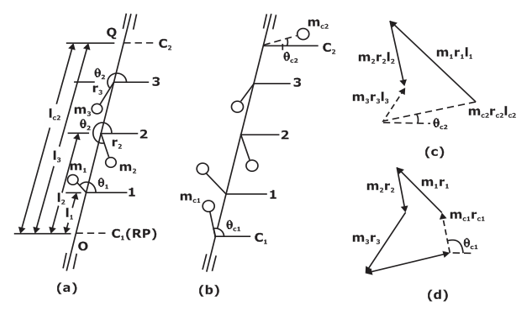
(a) Balancing of several masses rotating in the same plane,
(b) System with counter mass/balancing mass,
(c) Moment Polygon, (d) Force Polygon
For complete balancing of the rotor, the resultant force and the resultant couple, both should be zero.
Get complete information about the GATE exam pattern, cut-off, and all those related things on the BYJU’S Exam Prep official youtube channel.



