Torsion Equation
By BYJU'S Exam Prep
Updated on: September 25th, 2023

A structural component will twist when loaded by a couple, which causes rotation about its longitudinal axis. In Solid Mechanics, this twisting is referred to as Torsion. The torsion equation is a relationship between the angle of twist in a bar, applied torque, shear stress produced, and the geometric properties of the bar cross-section. Let us check the torsion equation given below.
This article will teach the torsion equation formula and its derivation. We will also examine the assumptions involved in the torsion equation derivation and torsion equation formula for some circular sections.
Table of content
What is Torsion Equation?
When a shaft is subjected to a couple, shear stress will be induced in the shaft. If the axis of rotation of the couple coincides with the longitudinal axis of the shaft, then the shaft is said to be subjected to pure torsion. The theory of pure torsion is the study of the behavior of the shaft in torsion without accounting for the bending moment caused by one’s weight or other longitudinal forces.
The torsion equation is derived from the theory of pure torsion that relates applied torque, torsional shear stress generated in the shaft, angle of twist, and geometrical properties of the shaft’s cross-section.
Torsion Equation Formula
The torsion equation formula for a shaft of uniform cross-section along the length is given as
T/J = τmax/R = Gθ/L
Where
- T = torque applied to the shaft
- J = polar moment of inertia
- τmax = maximum shear stress produced by the shaft
- R = radius of the shaft
- G = modulus of rigidity of the material of the shaft
- θ= angle of twist in radians
- L = length of the shaft
Assumptions in Torsion Equation
There are some assumptions involved in the torsion equation. These assumptions need to be studied before performing torsion equation derivation. These assumptions are listed below:
- Material is isotropic and homogeneous
- Material is linearly elastic and obeys Hooke’s law.
- The shaft should have a uniform cross-section and be perfectly straight.
- The cross-section of the shaft should remain plane before and after twisting.
- All the diameters of the cross-section should rotate at the same angle.
Torsion Equation Derivation
Consider a solid cylindrical shaft of radius R and length L as shown in the figure. A twisting moment T is applied at one end of the shaft and a balancing couple of equal magnitude on the other end. This torque will result in angular deformation in the shaft.
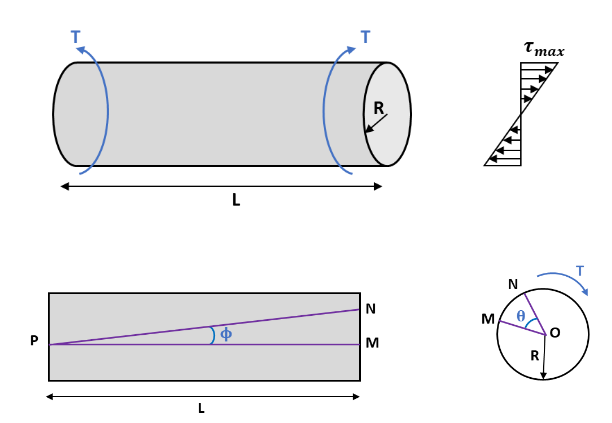
Assume a line PM on the surface of the shaft parallel to the longitudinal axis before the deformation of the shaft and after the deformation due to torsion, the line becomes PN. The angle MPN = represents the shear strain at the surface of the shaft. The arc MN will be,
MN=LΦ (∵ Φ is small)
Φ=MN/L…(i)
Let angle MON =θ which is the angular movement of the radius OM due to twisting. It is also called the angle of twist. The shear stress will vary from zero at the centre of the shaft to maximum at the surface. Let τmax be the maximum shear stress at the surface of the shaft
We know that the modulus of rigidity,
G=shear stress/Shear strain=τmax/Φ…(ii)
τmax=G
From eq. (i)
τmax=G×MN/L
But, MN=Rθ
τmax=GRθ/L
τmaxR=Gθ/L…(iii)
Let be the shear stress at an interior section of the shaft at a radius of r.
τ/r=Gθ/L
τmax/R=τ/r=Gθ/L…(iv)
Moment of Resistance
Consider an elemental area dA at any radius r on the cross-section of the shaft. The shear stress developed by this elemental area will be
τ=τmaxr/R [from eq. (iv)]
Shear force produced by the elemental area,
τdA=τmax/R)rdA
Therefore, the moment of resistance produced by the elemental area
τdA=τmax/R)rdA.r
τdA=(τmax/R)dA.r2
Total moment of resistance produced by the entire cross-section of the shaft
T=(τmax/R)ΣdA.r2
We know that ΣdA.r2 is the polar moment of inertia of the shaft (moment of inertia about the longitudinal axis of the shaft).
T=(τmax/R). J
Where J = polar moment of inertia of the shaft
T/J=τmax/R…(v)
From equations (iii) and (v) we get the torsion equation as
T/J=τmax/R=Gθ/L
|
Important GATE Topics |
|
| Lan Full Form | Propped Cantilever Beam |
| Torsional Force | POP Full Form |
| RTC Full Form | Fcfs Scheduling Full Form |
| Types Of Loads | E-Commerce Mcq |
| Laser Full Form | Rankine Formula |