- Home/
- GATE ELECTRONICS/
- GATE EC/
- Article
Modulation Schemes and Decoding-I Study Notes for GATE Exam 2022
By BYJU'S Exam Prep
Updated on: September 25th, 2023

Modulation Schemes and Decoding-I Study Notes: In this article, Candidates can find study notes on Modulation Schemes and Decoding-I consists of topics such as Introduction, Pulse Code Modulation (PCM), Quantization, Companding, Differential Pulse Code Modulation (DPCM)
Table of content
Introduction
- The term digital communication covers a broad area of communications techniques, including digital transmission and digital radio.
- Digital transmission is the transmission of digital pulses between two or more points in a communication system.
- Digital radio is the transmission of digitally modulated analogue carriers between two or more points in a communication system.
- The primary advantage is the ease with which digital signals, compared to analogue signals, are regenerative.
The shape of the waveform is affected by two mechanisms:
- As all the transmission lines and circuits have some non-ideal transfer function, there is a distorting effect on the ideal pulse.
- Unwanted electrical noise or other interference further distorts the pulse waveform.
Both of these mechanisms cause the pulse shape to degrade as a function of distance. During the time that the transmitted pulse can still be reliably identified, the pulse is thus regenerated. The circuit that performs this function at regular intervals along a transmission system is called regenerative repeaters.
- Digital circuits are less subject to distortion and interference than analogue circuits.
- Digital circuits are more reliable and can be produced at a lower cost than analogue circuits. Also, digital hardware lends itself to more flexible implementation than analogue hardware.
- Digital techniques lend themselves naturally to signal processing functions that protect against interference and jamming.
Elements of Digital Communication

- The source output may be either an analogue signal (such as an audio or video signal) or a digital signal (such as the output of a teletype machine) that is discrete in time and has a finite number of output characters.
- In a digital communication system, the messages produced by the source are converted into a sequence of binary digits. The process of efficiently converting the output of either an analogue or digital source into a sequence of binary digits is called source encoding or data compression.
- The sequence of binary digits from the source encoder, which we call the information sequence, is passed to the channel encoder. The purpose of the channel encoder is to introduce, in a controlled manner, some redundancy in the binary information sequence that can be used at the receiver to overcome the effects of noise and interference encountered in the transmission of the signal through the channel. This increase the reliability of the received data and improves the fidelity of the received signal.
- The binary sequence at the output of the channel encoder is passed to the digital modulator, which serves as the interface to the communication channel. Since nearly all the communication channels encountered in practice are capable of transmitting electrical signals (waveforms), the primary purpose of the digital modulator is to map the binary information sequence into signal waveforms.
- Let us suppose that the coded information sequence is to be transmitted one bit at a time at some uniform rate R bits per second (bits/s). The digital modulator may simply map the binary digit 0 into a waveform so(t) and the binary digit 1 into a waveform s, (t). In this manner, each bit from the channel encoder is transmitted separately. We call this binary modulation.
- Alternatively, the modulator may transmit 6 coded information bits at a time by using M = 2h distinct waveforms so(t), i = 0, 1, …, M – 1, one waveform for each of the 26 possible b-bit sequences. We call this M-ary modulation (M > 2).
- Note that a new b-bit sequence enters the modulator every b/R seconds. Hence, when the channel bit rate R is fixed, the amount of time available to transmit one of the M waveforms corresponding to a b-bit sequence is b times the time period in a system that uses binary modulation.
- At the receiving end of a digital communication system, the digital demodulator processes the channel-corrupted transmitted waveform and reduces the waveforms to a sequence of numbers that represent estimates of the transmitted data symbols (binary or M-ary).
- This sequence of numbers is passed to the channel decoder, which attempts to reconstruct the original information sequence from knowledge of the code used by the channel encoder and the redundancy contained in the received data.
The source decoder accepts the output sequence from the channel decoder and, from knowledge of the source encoding method used, attempts to reconstruct the original signal from the source.
Pulse Code Modulation (PCM)
- The simplest form of pulse digital modulation is called Pulse Code Modulations (PCM), wherein each analogue sample value is quantized into a discrete value for representation as a digital code word.
- In this modulation scheme, we first sampled the analogue signal then quantize it to convert it into levels and then encode it and then send it in the form of digital codes.
- If there is n bit quantizer and the sampling rate is f S’ then the bit rate will be Rb = n.fs bits/sec

- The essential operations in the receiver are regeneration of impaired signals, decoding and demodulation of the train of quantized samples.
- Bandwidth requirement is minimum Rb /2 and maximum Rb.
Quantization
- Quantization refers to the use of a finite set of amplitude levels and the selection of a level nearest to a particular sample value of the message signal as the representation for it.
- Basically, the quantizers are of two types:
- Uniform quantizer
- Non-uniform quantizer
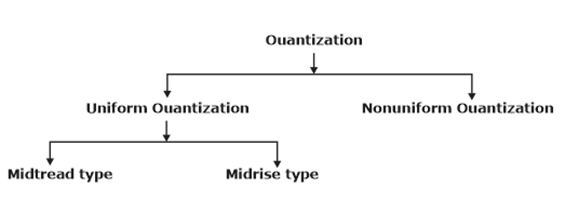
Uniform Quantizer:
- A uniform quantizer is that type of quantizer in which the step size remains the same throughout the input range.
- This is the process of setting the sample amplitude, which can be continuously variable to a discrete value.

- We assume that the amplitude of the signal m(t) is confined to the range (-mp, +mp ). This range (2mp) is divided into L levels, each of step size δ = 2 mp / L.
- A sample amplitude value is approximated by the midpoint of the interval in which it lies.
- If we are using a uniform quantizer with step size δ or Δ,

- Then maximum quantization error will be ± Δ /2
- Normally used uniform quantizers are mid tread type and midrise type.
Non-uniform Quantizer:
- A non-uniform quantizer is that type of quantizer in which the step size varies according to the input values. Because of quantization, inherent errors are introduced in the signal. This error is called quantization error.
- Signal to quantization noise ratio for PCM for sinusoidal input is (for uniform quantizer)
![]()
where n is a bit of quantizer.
- As bit of quantizer increases SQNR increases but at the same time bandwidth requirement for transmission also increases.
Companding Process:- To compress the signal at transmitter and expand the signal at the receiver is combined called companding. Compression and expansion are done by passing the signal through the amplifier having non-linear transfer characteristics.

There are two types of companding techniques μ-law companding and A-law companding.
μ-law Companding:
- The compression characteristics are continuous.
- It uses a logarithmic compression curve which is ideal in the sense that quantization intervals and hence quantization noise is directly proportional to signal level

where, μmax = 225
A-law Companding:
- The compression characteristics are piecewise, made up of a linear segment for low-level inputs and a logarithmic segment for high-level inputs.
- This is the ITU-T standard.
- It is very similar to the μ-Law coding. It is represented by straight line segments to facilitate digital companding.


where, Amax = 87.6
- The signal to noise ratio of PCM remains almost constant with companding.
- Companding is done to avoid non-linear distortion of the channel.
- Companding is widely used in telephone systems to reduce non-linear distortion and also to compensate for signal level difference between soft and loud talkers.
Differential Pulse Code Modulation (DPCM)
- Differential pulse-code modulation (DPCM) is a signal encoder that uses the baseline of pulse-code modulation (PCM) but adds some functionalities based on the prediction of the samples of the signal.
- The input can be an analogue signal or a digital signal.
- If the input is a continuous-time analogue signal, it needs to be sampled first so that a discrete-time signal is an input to the DPCM encoder.
- When the samples of a signal are highly correlated, then we go for DPCM in order to save bandwidth or using the same bandwidth at a higher data rate.
- In DPCM, the principle used is prediction.
The two main differential coding schemes are:
- Delta Modulation
- Differential PCM and Adaptive Differential PCM (ADPCM)
Delta Modulation:
- Delta modulation converts an analogue signal, normally voice, into a digital signal.
- Delta modulation is a special case of differential pulse code modulation.
- It is called a one bit DPCM as it transmits only one bit per sample.
- In delta modulation, the problem of slope overload occurs if the input is changing very fast that is:

- To overcome slope overload error, we choose the optimum size of Δ such that.


where Δopt = Optimum size of Δ
Hunting is the second problem, this occurs when a message is almost constant.
Adaptive Delta Modulation:
The adaptive delta modulation is a scheme in which, step choose step size in accordance with the message signal’s sampled value to overcome slope overload error and hunting. If the message varies at a high rate, then step size is high and if the message is varying slowly, then step size is small.
The Aspirants can revise the concepts and practice by 150+ Mock Tests with BYJU’S Exam Prep Test Series for exams like GATE, ESE, NIELIT from the following link:
Click Here to Avail Electronics Engineering Test Series (150+ Mock Tests)
Get unlimited access to 24+ structured Live Courses all 150+ mock tests for boosting your GATE 2021 Preparation with Online Classroom Program:
Click here to avail Online Classroom Program for Electronics Engineering
Thanks.
#DreamStriveSucceed