- Home/
- GATE ELECTRICAL/
- GATE EE/
- Article
What is a Closed-Loop Control System?
By BYJU'S Exam Prep
Updated on: September 25th, 2023

In the present-day lifestyle, we strive for automation in every possible way. Still, how to achieve this automation, the answer will point towards the design of automatic control systems. The word automatic comes with a certain complexity and sophistication in the control system; that is, the system itself capable of adapting to various operating conditions, and it must respond to the diverse forms of the inputs swiftly and effectively. But how to achieve full control over the output with the least or no human monitoring? The answer will be the construction of the feedback from the control system’s output to compare it with a reference point and control the input according to the system’s need. This is what we call a closed-loop control system.
In this article, we will discuss the basic construction aspects of the closed-loop control system, the block-diagram representation of the closed-loop control system, the effect of feedback on various operating parameters, etc.
Download Formulas for GATE Electrical Engineering – Signals and Systems
Table of content
What is a Closed Loop Control System?
The control system with one or more feedback paths is called the closed-loop control system. This is why a closed-loop control system is also known as a feedback control system.
Design of a Closed Loop Control System
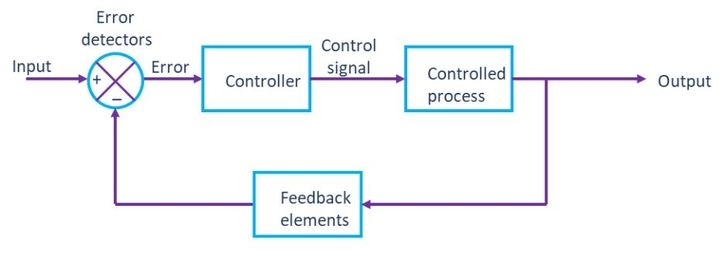
The primary objective of design is the same in both open-loop control systems and closed-loop control systems. Depending on our output requirement, we set input to the controller, which generates the control signal, and this control signal is fed to the processing unit to achieve the output. So far, the process and design are the same for open-loop and closed-loop control systems, but the primary difference is that the achieved output is measured with the help of a measuring instrument to compare with a set output value. Hence the measuring instrument acts as a feedback to the output. The error detector will compare the measured value with the pre-set value of the output, and an appropriate actuating signal is sent to the controller to correct the output.
Download Formulas for GATE Electrical Engineering – Electromagnetic Theory
Closed Loop Control System Block Diagram
The essential block diagram representation of a closed-loop control system is shown below.
Based on the need of the user and the system complexity, there may be any number of feedback loops.
Closed Loop Control System Examples
Human beings are the most complex and sophisticated feedback control systems in existence. Hence consider an example of picking an apple from the desk. After you reach the desk, the brain sends a control signal to your hand to pick the apple, your eyes act as the feedback, and the distance between your hand and the apple is the error. The brain and eyes are coordinated to minimize the error and to achieve the objective that is picking the apple. If you are blindfolded and asked to pick the same apple, then the feedback that is your eyes are absent; you are reaching towards the object with a blind estimation. Hence there is a chance that you might miss the apple by a significant margin. So, in the first case, your body acts as a closed-loop control system with feedback in the form of eyes; in the second case, your body acts as an open-loop control system.
Similarly, if thsupposesystem can correct the error by using the feedback provided in the form of measuring instruments and various controllers, suc, in that case, systems are the best examples of closed-loop control systems, such as automatic lighting systems, automatic voltage controllers, pilotless locomotives, etc.
Download Formulas for GATE Electrical Engineering – Electrical Machines
Canonical Form of Closed Loop Control System
Let,
- Xi(s)→Input signal
- X0(s)→Output signal
- G(s)→Transfer function of the open-loop control system
- H(s)→Gain of the elements in the feedback path
- B(s)→The output of feedback elements
- E(s)→Error signal
Then the closed-loop control system can be represented as shown below.
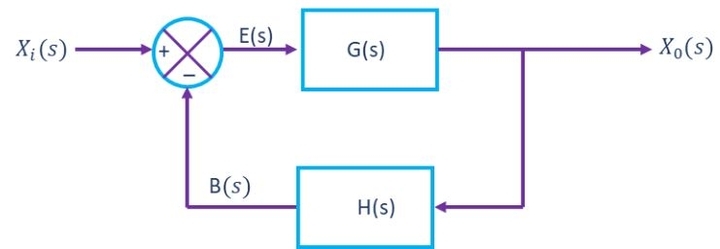
From the above diagram
G(s)=X0(s)/E(s)
⇒E(s)=X0(s)/G(s)
E(s) can also be written as
E(s)=Xi(s)−B(s)
⇒X0(s)/G(s)=Xi(s)−B(s)
From the diagram,
H(s)=B(s)/X0(s)
⇒X0(s)/G(s)=Xi(s)−H(s)X0(s)
⇒X0(s)=G(s)Xi(s)−G(s)H(s)X0(s)
⇒X0(s)[1+G(s)H(s)]=G(s)Xi(s)
⇒X0(s)/Xi(s)=G(s)/1+G(s)H(s)
This is the standard form of representing the closed loop control system with negative feedback. However, the summing point (⊗) may have more than one feedback input in the form of negative feedback (feedback will be subtracted from the input) or positive feedback (feedback will be added to the information). Still, its output will be the algebraic sum of all inputs.
Effect of Feedback on the System Performance
The feedback construction in the closed loop control system is responsible for the accurate and effective output of the system. Still, we have to compromise on some system parameters while gaining this advantage. Here we will discuss how the feedback affects the system’s key parameters.
Effect on System Gain
If G(s) be the gain of the open-loop control system, then from the standard form of the closed-loop control system, we can observe that the feedback affects the gain by a factor 1+G(s)H(s). There is no rule that the magnitude GH is always greater than 1, as it will be a negative or positive quantity, so based on this value and the type of feedback, the gain may increase or decrease.
Practically, G(s) and H(s) are frequency parameters, so the value of 1+G(s)H(s) may be less than one in one frequency range and may be greater than one in another range of frequencies. Hence feedback will undoubtedly affect the system gain, but how the gain changes will depend on the value of 1+G(s)H(s).
Effect on Sensitivity
Sensitivity is one of the most significant considerations in designing a control system, as the properties of elements involved in the design vary with age and environmental conditions. For example, the transformer’s electrical properties change with the machine’s temperature and age.
A control system is highly sensitive if its control objective is affected due to any internal or external disturbances. In any control system, the desirable feature is it should be less sensitive to external disturbances. Here we will discuss how sensitive the closed-loop control system is to the disturbances in its forward path and a feedback path.
If 𝛼 is the variable that changes its value,
𝛽 is a parameter that changes the value of 𝛼, then the sensitivity of 𝛼 concerning 𝛽 is given by
S𝛼β=% change in 𝛼/ % change in β = ∂𝛼/𝛼/∂𝛽/𝛽
S𝛼β= 𝛽∂𝛼/𝛼∂𝛽
Case (i): Sensitivity of closed-loop control system for disturbances occur in the forward path elements.
Let 𝛼 is closed-loop control system M(s),
M(s)= G(s)/[1+G(s)H(s)]
And β be the disturbance in the forward path elements, that is G(s), then
SM(s)G(s)=G(s)∂M(s)/M(s)∂G(s)
From the equation of M(s), we can write,
G(s)/M(s)=1+G(s)H(s)
∂M(s)/∂G(s)={[1+G(s)H(s)](1)−G(s)H(s)}/(1+G(s)H(s))2
⇒SM(s)G(s)=1+G(s)H(s)/(1+G(s)H(s))2
⇒SM(s)G(s)=1/1+G(s)H(s)
So, in this case, the sensitivity function can be made small by increasing the value G(s)H(s).
Case (ii): Sensitivity of closed loop control system for disturbances occur in the feedback path elements.
Let α=M(s)𝛼=M(s), β=H(s)𝛽=H(s)
⇒SM(s)H(s)=H(s)∂M(s)/M(s)∂H(s)
From the equation of M(s), we can write,
H(s)/M(s)=[1+G(s)H(s)]H(s)/G(s)
⇒SM(s)G(s)=G(s)H(s)/1+G(s)H(s)
In this case, it is difficult to minimize the sensitivity, so the closed-loop control system or the feedback control system is more sensitive to the disturbances in the feedback elements.
Effect on Stability
If the system can respond to the input command effectively, then the system is said to be stable. If the output increases without bounds, the system is said to be out of control or unstable. In the standard representation of a closed-loop control system, if the value of G(s)H(s)=-1, then the system output will be infinitely large for a finite input value. It is to be noted that G(s)H(s)=-1 may not be the only condition for the instability. So, even the feedback is key in obtaining the controlled output, at the same time, it is harmful when we use it inappropriately.
In such cases, when G(s)H(s)=-1, the system can be stabilized by introducing another feedback loop. Let us assume that the gain of the new feedback loop is L(s), and then the closed loop system will be represented as
X0(s)/Xi(s)=G(s)/1+G(s)H(s)+G(s)L(s)
So, these are the key parametric variations due to the introduction of feedback in the system; we will have a deeper analysis of the closed-loop control system in our lectures.