- Home/
- GATE ELECTRICAL/
- GATE EE/
- Article
Study Notes on System Stability Concepts For Electrical Engineering Students
By BYJU'S Exam Prep
Updated on: September 25th, 2023

In this resource, we delve into the fundamental principles and analysis techniques that are crucial for understanding and ensuring the stability of electrical power systems. With a strong focus on practical applications, these notes will provide you with a solid foundation to comprehend the behaviour of power systems under varying conditions and mitigate the risks associated with instability. Whether you are a student preparing for exams or a professional seeking to enhance your knowledge, these study notes will equip you with the necessary tools to tackle the complexities of system stability in electrical engineering.
In this series of study notes, we explore the essential concepts and methodologies related to system stability in the realm of electrical engineering. From the basics of stability analysis to advanced topics such as transient stability and frequency response, these notes cover a wide range of crucial aspects. By studying these notes, you will gain insights into the causes of system instability, the different types of stability, and the measures employed to maintain a robust and reliable power system. We will also discuss key stability analysis techniques, including modal analysis, eigenvalue analysis, and the use of power system stabilizers (PSS). With a focus on real-world examples and practical scenarios, these study notes will equip you with the knowledge and skills needed to evaluate and enhance system stability in electrical engineering applications.
Download Formulas for GATE Electrical Engineering – Electrical Machines
Table of content
Power System Stability
A power system at a given operating state is stable if following a given disturbance or a set of disturbances. The system stays within specified bounds and the system reaches a new stable equilibrium state within a specified period of time.
The stability studies which evaluate the impact of disturbances on the behaviour of synchronous machines of the power system are of two types: transient stability and steady-state stability.
- The transient stability studies involve the determination of whether or not synchronism is maintained after the machine has been subjected to a severe disturbance. This may be a sudden application of a large load, a loss of generation, a loss of a large load, or a fault (short circuit) in the system. In most disturbances, oscillations are of such magnitude that linearization is not permissible and nonlinear equations must be solved to determine the stability of the system.
- Steady-state stability is concerned with the system subjected to small disturbances wherein the stability analysis could be done using the linearized version of nonlinear equations.
In practice, load change may not be gradual. Further, there may be sudden
disturbances due to
- A sudden change in load
- Switching operation
- Loss of generation
- Fault
Swing Equation
![]()
Where M = Iω = Angular momentum in J-s mechanical radian.
I = Moment of Inertia.
Pa = Iαω = Taω = Accelerating power
α = Angular acceleration
ω = Angular velocity
Ps = Shaft power
Pe = Electrical power
δ = Power angle or torque angle
Inertia Constant
Inertia constant ![]()
Stored energy in megajoule = G × H

Inertia constant (H) on a Common Base

Where S = MVA rating
Key Points
- The equivalent inertia constant (Heq) of several identical machines working in parallel is the same as that of any one of the machines (Heq = H).
- The equivalent inertia constant (Heq) of two machines on a common base swing coherently Heq = H1 + H2
- The equivalent inertia constant (Heq) of two synchronous machines which do not swing together is.

Power Output of the Generator
The power output of a generator refers to the electrical power it produces, typically measured in kilowatts (kW) or megawatts (MW). It represents the generator’s ability to convert mechanical energy into electrical energy, playing a crucial role in meeting the power demands of various applications, including power generation plants, industrial facilities, and renewable energy systems. Consider the following figure, for the calculation of the power flow

The complex power output of the generator

Where, E = | E | < δ = Voltage behind direct axis synchronous reactance of generator
| V | = Terminal voltage of the generator
Xd = Direct axis synchronous reactance of synchronous machine
The active power output of the generator

The reactive power output of the generator,

Where 
Pt = Synchronizing power coefficient
Power Flow
For lossless line R = 0 and the transmitted power.

R + jX = z<θ
For lossless line, R = 0 and the transmitted power.
![]()
Where Vs = Sending end voltage
VR = Receiving end voltage
X = Reactance of the line
δ = Load angle
Key Points
- For maximum power transferring δ = 90o
![]()
- For power to be maximum

Equal Area Criterion
The accelerating power in the swing equation will have a sine term. Therefore the swing equation is a non-linear differential equation and obtaining its solution is not simple. For two machine systems and one machine connected to an infinite m bus bar, it is possible to say whether a system has transient stability or not, without solving the swing equation. Such criteria which decide the stability make use of the equal area in the power angle diagram and hence it is known as EQUAL AREA CRITERION. Thus the principle by which stability under transient conditions is determined without solving the swing equation, but makes use of areas in the power angle diagram, is called the EQUAL AREA CRITERION.

In a two-machine system, under the usual assumptions of constant input, and constant voltage behind transient reactance, the angle between the machines either increases indefinitely or else, after all, disturbances have occurred, oscillates with constant amplitude. In other words, the two machines either fall out of step on the first swing or never. Under these conditions, the observation that the machines come to rest with respect to each other may be taken as proof that the system is stable. There is a simple graphical method of determining whether the machines come to rest with respect to each other. This method is known as the equal area criterion of stability.

When the fault occurs at t=0, the electrical power output is suddenly zero while pm is unaltered. The difference in power must be accounted for by a rate of change of stored kinetic energy in the rotor masses. This is accomplished only by an increase in speed which results from the constant accelerating power pm.
After reaching δ2, δ(t) will oscillate until losses and the load damp oscillations and δ(t) = δ0
If δ2 > δ3 the generator loses stability because of pe < pm and the generator continue to accelerate.
Sudden load increase on Synchronous motor
Let us consider a synchronous motor connected to an infinite bus bar.
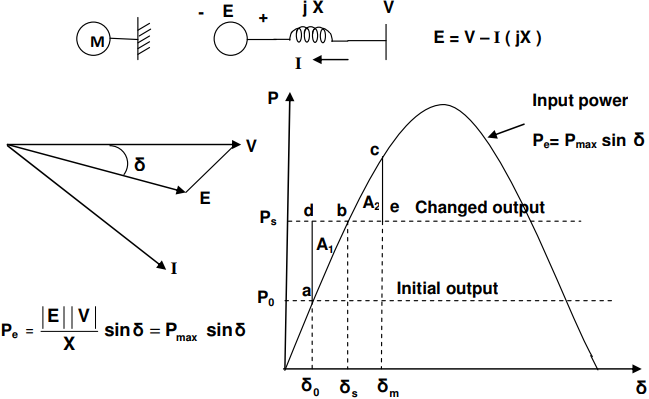
The following changes occur when the load is increased suddenly.
Point a Initial condition; Input = output = Po; ω = ωs; δ= δo
Due to sudden loading, output = Ps; output > Input;
ω decreases from ωs; δ increases from δo.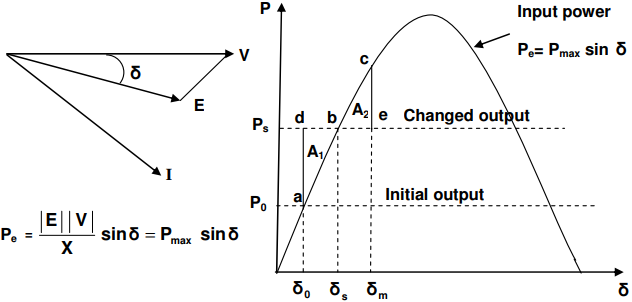
Between a-b Output > Input
Deceleration; ω decreases; δ increases.
Point b Output = Input; ω=ωmin which is less than ωs; δ = δs.
Since ω is less than ωs, continues to increase.
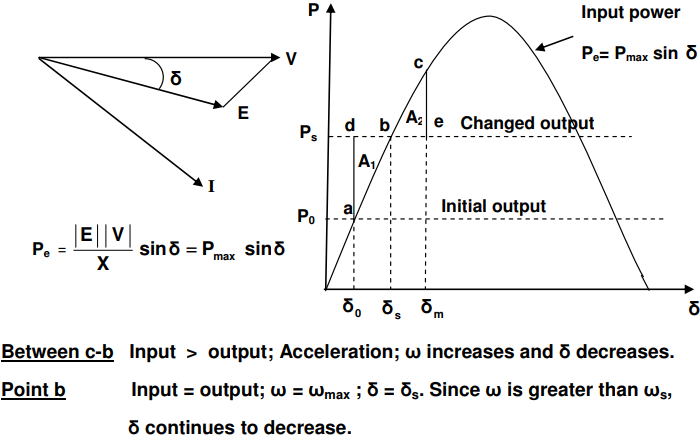
Between b-c Input > output
Rotating masses start gaining energy;
Acceleration; ω starts increasing from minimum value but still less than ωs; continues to increase.
Point c; Input > Output
ω= ωs; δ= δm; There is acceleration; ω is going to increase from ωs; hence δ is going to decrease from δm.
Between b-a Output > input
Deceleration; ω starts decreasing from ωmax ;
but still greater than ωs; δ continues to decrease.
Point-a; ω= ωs; δ= δ0; Output > Input; The cycle repeats.
Because of damping present in the system, subsequent oscillations become smaller and smaller and finally b will be the steady-state operating point.
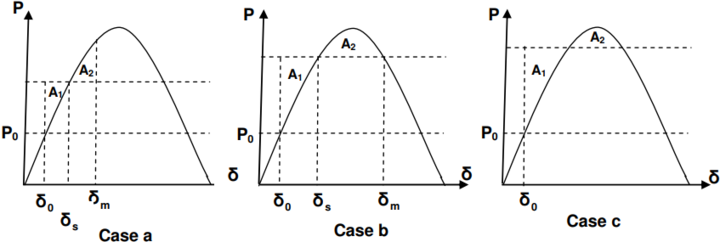
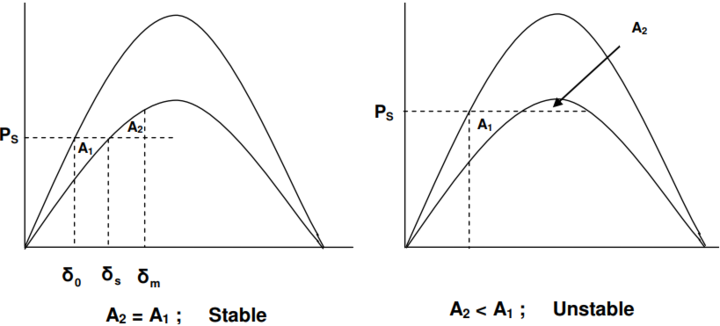
Interpretation of equal area


Thus for stability, area δ0 a b c δm = area δ0 a d e δm
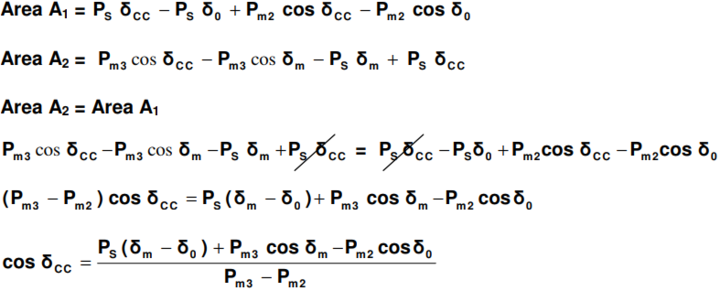
Subtracting area δ0 a b c δm from both sides of the above equation, we get A2=A1. Thus for stability,
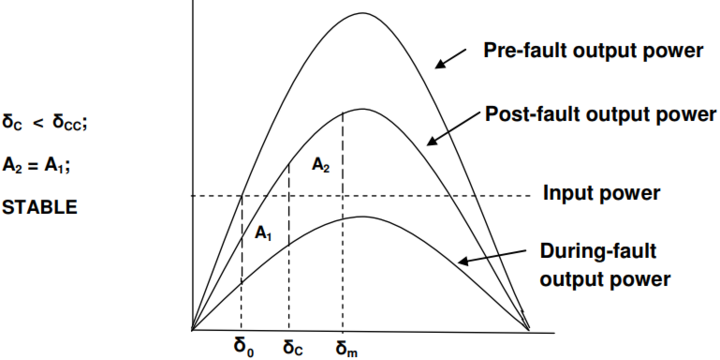
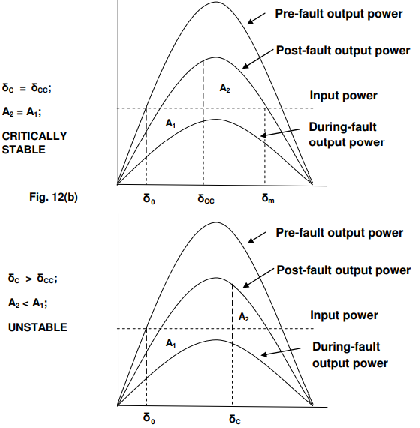
Below we are showing three different cases:
The one shown in case a is STABLE. Case b indicates CRITICALLY STABLE while case c falls under UNSTABLE.
Application of Equal Area Criterion
- Opening of one of the parallel lines
When a generator is supplying power to an infinite bus over two parallel transmission lines, the opening of one of the lines will result in an increase in the equivalent reactance and hence a decrease in the maximum power transferred. Because of this, depending upon the initial operating power, the generator may lose synchronism even though the load could be supplied over the remaining line under steady-state conditions.
- Short circuits occurring in the system
Short circuit occurring in the system often causes loss of stability even though the fault may be removed by isolating it from the rest of the system in a relatively short time. A three-phase fault at one end of a double circuit line is shown in the Figure below which can be reduced as shown in the next figure.
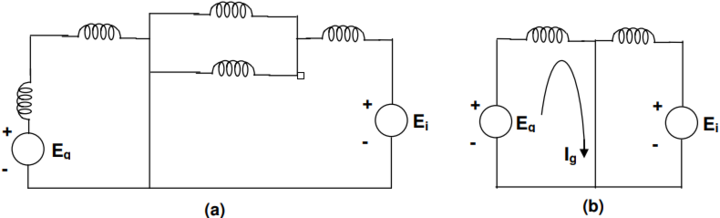
It is to be noted that all the current from the generator flows through the fault and this current Ig lags the generator voltage by 90o. Thus the real power output of the generator is zero. Normally the input power to the generator remains unaltered. Therefore, if the fault is sustained, the load angle will increase indefinitely because all the input power will be used for acceleration, resulting in unstable conditions.
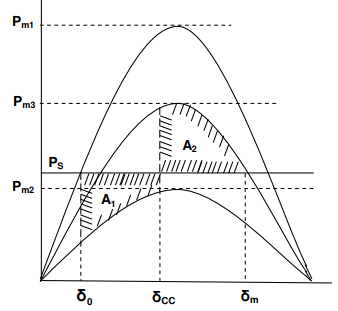
When the three-phase fault occurring at one end of a double circuit line is disconnected by opening the circuit breakers at both ends of the faulted line, power is again transmitted. If the fault is cleared before the rotor angle reaches a particular value, the system will remain stable.
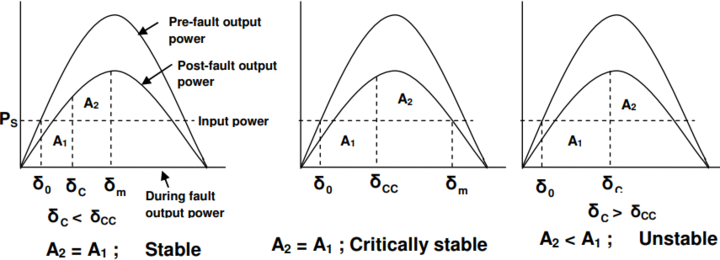
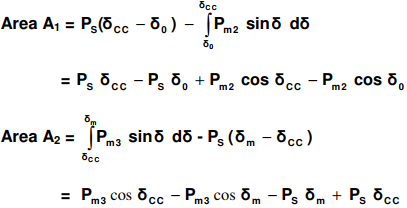
Expression for critical clearing angle δCC



-
If you are preparing for GATE and ESE, avail Online Classroom Program to get unlimited access to all the live structured courses and mock tests from the following link :
Get complete information about the GATE exam pattern, cut-off, and all those related things on the BYJU’S Exam Prep official youtube channel.